Um sonho tornado realidade: o robô que apanha fruta fresca
Resumo
O FF Robot collector oferece ao agricultor uma alternativa mais eficaz e eficiente que poupa custos de mão de obra, aumentando a rentabilidade da exploração. Este sistema também oferece a oportunidade de melhorar significativamente a produção de fruta, a sustentabilidade dos pomares e a segurança alimentar com capacidades de agricultura de precisão, fornecendo dados de produção e qualidade da fruta obtidos de forma autónoma durante a colheita.
No futuro, o FFRobot poderá também efetuar o desbaste e a poda de flores e frutos, aumentando assim a sua utilização durante toda a estação e a sua rentabilidade. A capacidade de efetuar a poda e o desbaste de forma consistente com uma máquina robotizada e os dados obtidos melhorarão muito a qualidade dos frutos e facilitarão a gestão da exploração.
Introdução
Desde que Eva, segundo o Antigo Testamento, colheu a primeira maçã – todos os frutos frescos (ou seja, para consumo direto sem qualquer transformação ou intervenção industrial) são colhidos à mão: Cerca de 120 milhões de toneladas de maçãs, peras, citrinos e frutos de caroço são colhidos para consumo direto todos os anos – todos colhidos por mãos humanas. Os agricultores que cultivam árvores de fruto, em todo o mundo, são obrigados, sem qualquer opção, a contratar, todos os anos, trabalhadores temporários, por vezes de países estrangeiros, para poderem colher os frutos e colocá-los no mercado pouco tempo depois de terem sido colhidos, a fim de evitar que apodreçam.
Problemas enfrentados pelos produtores
Já é sabido que estes produtores são testemunhas, desde há vários anos, de problemas comuns:
Escassez de trabalhadores
- Uma escassez aguda de mão de obra humana que, durante muitos anos, obrigou os fruticultores a deixar os frutos apodrecer nas árvores devido à indisponibilidade de mão de obra: Simplesmente – os velhos colhedores reformam-se e os jovens não querem trabalhar na agricultura, especialmente na apanha da fruta: É um trabalho rotineiro, cansativo e aborrecido, que exige longas horas de pé em escadas (com risco de queda), carregando um saco pesado com os frutos colhidos, carregando esse saco enquanto desce a escada e caminhando até um contentor central para esvaziar o saco.
- Um grande número destes apanhadores de fruta não são trabalhadores permanentes na exploração e são recrutados todos os anos, sempre que possível, pelo que a maioria destes trabalhadores temporários necessita de formação antes da época de colheita. Para além disso, as restrições aos vistos de trabalho temporário aumentaram as dificuldades de recrutamento de mão de obra estrangeira.
Custo da mão de obra
- Os custos de recrutamento de trabalhadores temporários aumentam a cada época de colheita, assim como os custos de transporte desde o país de origem, de alojamento, de alimentação, de acidentes e de prémios de seguro médico.
Probabilidade de exploração
- Os novos trabalhadores necessitam de formação no início da época de colheita. Os trabalhadores sem essa formação ou, mesmo com essa formação, mas sem grande experiência na apanha – têm um efeito negativo no volume de frutos colhidos e na qualidade dos frutos por eles colhidos – o que significa menos rentabilidade para o agricultor.
- Os trabalhadores são subjectivos e a sua decisão sobre a colheita pode ser influenciada pela hora do dia, pelo estado de espírito e por outros factores. A qualidade dos frutos colhidos por eles é muitas vezes menos consistente – o que significa menos lucro para o agricultor.
- Como efeito direto da escassez de trabalhadores/trabalhadores experientes acima referida, a colheita atempada da fruta, que é um fator-chave para a sua qualidade, não é frequentemente efectuada, pelo que a rentabilidade é novamente afetada negativamente.
- Por último, mas não menos importante, um trabalhador não experiente ou recém-formado não conseguirá atingir o volume ideal de colheita de frutos, reduzindo assim o rendimento possível por mais frutos vendidos.
Solução: colheita totalmente robotizada
A colhedora FFRobot (Figura 1) é, de facto, um sistema integrado autopropulsionado que colhe a fruta das árvores e a entrega suavemente nos contentores do pomar. O sistema é composto por três componentes principais – uma plataforma híbrida que fornece energia, move a máquina e manuseia os contentores; uma estrutura de 12 braços robóticos independentes, seis (6) de cada lado da plataforma com sistemas de deteção e inteligência de IA para colher a fruta; e um sistema integrado de manuseamento da fruta e de enchimento dos contentores. A máquina é completamente automática e autónoma durante a colheita no pomar. Por razões de segurança, um supervisor está na máquina em caso de avaria e para posicionar a máquina na fila de árvores.

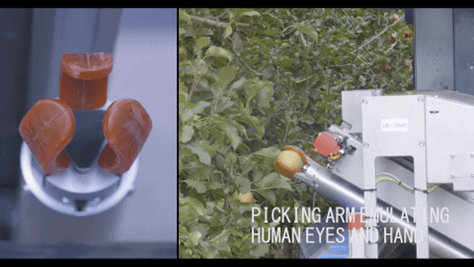
Na extremidade de cada braço robótico existe uma pinça para agarrar a fruta, rodá-la ou cortá-la do seu caule (dependendo do tipo de fruta) (Figura 2). A pinça é guiada por um sistema de câmaras, processamento de imagem sofisticado e inteligência artificial que garante que a fruta pode ser acedida e removida sem danos e que apenas a fruta alvo é colhida com base nas especificações do pomar.

Funcionalidade
O FFRobot Harvester é conduzido pelo supervisor até o início da fileira de árvores. O Harvester fica então em frente a uma secção das árvores (normalmente 2 árvores, dependendo da estrutura do pomar) em ambos os lados da plataforma na linha (Figura 3).

Guiado por um sofisticado software de Processamento de Imagem/Visão e Inteligência Artificial e algoritmos de última geração, o FFRobot, usando uma variedade de câmaras e sensores, tira uma fotografia da secção das árvores em ambos os lados do FFRobot, analisa as imagens, identifica a localização dos frutos nas árvores, avalia potenciais obstáculos que possam impedir a remoção de frutos de qualidade, determina – com base nos critérios do produtor introduzidos no sistema informático do FFRobot – o tamanho e a cor dos frutos, e seleciona os que devem ser colhidos de acordo com estes critérios, e dá instruções a cada braço robótico para se deslocar para um determinado fruto – e colhê-lo. Os doze braços funcionam em simultâneo para colher a fruta a um ritmo de produção elevado.
Assim que a fruta é colhida pela Pinça – cada Braço recua para a base do FFRobot, coloca a fruta – suavemente – num tapete rolante, que conduz a fruta para um contentor no fundo da Plataforma. A Plataforma transporta três (3) caixotes e, quando um caixote está cheio de fruta, a Plataforma coloca-o suavemente no chão, na parte de trás da Plataforma, e escolhe um novo caixote vazio.
Uma vez colhidos os frutos das árvores de ambos os lados da Plataforma, esta desloca-se – de forma automática e autónoma – para a secção seguinte de árvores e inicia, de novo, o procedimento acima descrito – até chegar ao fim da fila e virar para a fila seguinte para continuar a colheita (Figura 4).

Especificações das funções da FFRobotics
O rendimento final do FFRobot Harvester é de 9.000 frutos por hora (por exemplo, cerca de 1,4-1,5 toneladas de maçãs por hora) – o que é cerca de 10 vezes mais do que a produção média de um colhedor humano qualificado. O FFRobot Harvester pode trabalhar 20 horas por dia (funciona também à noite com iluminação artificial montada na plataforma), produzindo assim cerca de 30 toneladas de frutos colhidos por dia.
O FFRobot Harvester normalmente alcança cerca de 90% dos frutos de uma determinada árvore num pomar configurado em parede de frutificação, com uma percentagem bastante baixa (5%) de danos nos frutos.
Durante o processo de colheita, o FFRobot recolhe dados e armazena-os para referência futura do produtor: Número total de frutos, bem como frutos colhidos por árvore, linha, dunam/acre e pomar, e estrutura das árvores. Estes dados podem ser utilizados para orientar futuras melhorias na gestão do pomar, de modo a fornecer fruta de melhor qualidade e melhorias na sustentabilidade.


