Um sonho tornado realidade: o robô coletor de frutas frescas
Resumo
O robô coletor FF oferece ao agricultor uma alternativa mais eficaz e eficiente que economiza custos de mão de obra, aumentando a lucratividade da fazenda. Este sistema também oferece a oportunidade de melhorar significativamente a produção de frutas, a sustentabilidade do pomar e a segurança alimentar com recursos de agricultura de precisão, fornecendo dados de produção e qualidade de frutas obtidos automaticamente durante a colheita.
No futuro, o FFRobot também poderá realizar desbastes e podas de flores e frutos, aumentando assim sua utilização ao longo da estação e aumentando sua lucratividade. A capacidade de realizar podas e desbastes consistentemente com uma máquina robótica e os dados obtidos melhorarão muito a qualidade da fruta e facilitarão o gerenciamento da fazenda.
Introdução
Desde que Eva, de acordo com o Antigo Testamento, colheu a primeira maçã – todas as frutas frescas (ou seja, para consumo direto sem qualquer processamento ou intervenção industrial) são colhidas à mão: Cerca de 120 milhões de toneladas de maçãs, peras, frutas cítricas e de caroço são colhidas para consumo direto a cada ano – todas colhidas por mãos humanas. Os agricultores que cultivam árvores frutíferas, em todo o mundo, são forçados, sem qualquer opção, a contratar, a cada ano, trabalhadores temporários, às vezes de países estrangeiros, para poderem colher as frutas e tê-las disponíveis para os mercados logo após tais frutas terem sido colhidas, a fim de evitar o apodrecimento.
Problemas enfrentados pelos produtores
Já é bem sabido que esses produtores testemunham, há vários anos, problemas comuns:
Escassez de trabalhadores
- Uma escassez aguda de trabalhadores humanos, que, por muitos anos, forçou os produtores de frutas a deixar as frutas apodrecendo nas árvores devido à indisponibilidade de mão de obra: Simplesmente – os colhedores mais velhos se aposentam, e os mais jovens não querem trabalhar na agricultura, especialmente na colheita de frutas: É um trabalho rotineiro, cansativo e chato, que exige longas horas em pé em escadas (com risco de cair), carregando um saco pesado carregado com as frutas que colheram, carregando esse saco enquanto descem a escada e caminhando até um recipiente central para esvaziar o saco.
- Muitos desses colhedores de frutas não são trabalhadores permanentes na fazenda e são recrutados novamente a cada ano, de modo que a maioria desses trabalhadores temporários precisa de treinamento antes da temporada de colheita. Além disso, as restrições aos vistos de trabalho temporário aumentaram as dificuldades no recrutamento de mão de obra estrangeira.
Custo de mão de obra
- O custo de recrutamento de trabalhadores temporários aumenta a cada temporada de colheita, assim como os custos de transporte dos trabalhadores do país de origem, moradia, alimentação, seguro contra acidentes e prêmios de seguro médico.
Probabilidade agrícola
- Novos trabalhadores precisam de treinamento no início da temporada de colheita . Trabalhadores sem tal treinamento ou, mesmo com tal treinamento, mas sem ampla experiência em colheita – têm um efeito negativo no volume de frutas colhidas e na qualidade das frutas colhidas por eles – o que significa menos lucratividade para o agricultor.
- Os trabalhadores são subjetivos, e sua decisão sobre a colheita pode ser influenciada pela hora do dia, humor e outros fatores. A qualidade das frutas colhidas por eles é frequentemente menos consistente – o que significa menos lucro para o fazendeiro.
- Como efeito direto da escassez de trabalhadores/trabalhadores experientes , a colheita oportuna da fruta, que é um fator essencial para sua qualidade, é frequentemente perdida, de modo que a lucratividade é afetada negativamente mais uma vez.
- Por último, mas não menos importante, um trabalhador inexperiente/recém-treinado não conseguirá atingir o volume ideal de colheita de frutas, diminuindo assim a renda possível com a venda de mais frutas.
Solução: colheita totalmente robótica
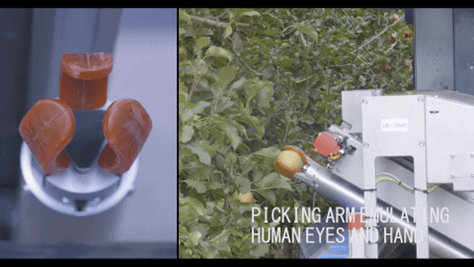
A colheitadeira FFRobot (Figura 1) é, na verdade, um sistema integrado autopropulsado que colhe frutas das árvores e as entrega suavemente em caixas no pomar. O sistema é composto por três componentes principais – uma plataforma híbrida que fornece energia, movimenta a máquina e manuseia as caixas; uma estrutura de 12 braços robóticos independentes, seis (6) em cada lado da plataforma com sistemas de detecção e inteligência de IA para colher as frutas; e um sistema integrado de manuseio de frutas e enchimento de caixas. A máquina é completamente automática e autônoma durante a colheita no pomar. Por razões de segurança, um supervisor fica na máquina em caso de mau funcionamento e para posicionar a máquina na fileira de árvores.

No final de cada Braço Robótico há um Gripper para agarrar a fruta, girá-la ou cortá-la do caule (dependendo do tipo de fruta) (Figura 2). O gripper é guiado por um sistema de câmeras, processamento de imagem sofisticado e inteligência artificial que garante que a fruta possa ser acessada e removida sem danos e que apenas a fruta alvo seja colhida com base nas especificações do pomar.

Funcionalidade
O FFRobot Harvester é conduzido pelo supervisor até o início da fileira de árvores. O Harvester fica então em pé na frente de uma seção das árvores (normalmente 2 árvores, dependendo da estrutura do pomar) em ambos os lados da Plataforma na fileira (Figura 3).

Guiado por sofisticados softwares de Processamento de Imagem/Visão e Inteligência Artificial e algoritmos de última geração, o FFRobot, usando uma variedade de câmeras e sensores, tira uma foto da seção das árvores em ambos os lados do FFRobot, analisa as fotos, identifica a localização das frutas nas árvores, avalia potenciais obstáculos que podem impedir a remoção de frutas de qualidade, determina – com base nos critérios do produtor inseridos no sistema de computador do FFRobot – o tamanho e a cor das frutas e seleciona aquelas a serem colhidas de acordo com esses critérios e instrui cada Braço Robótico a se mover até uma fruta específica – e colhê-la. Os doze braços operam simultaneamente para colher frutos em alta taxa de produção.
Assim que a fruta é colhida pelo Gripper, cada braço recua para a base do FFRobot, coloca a fruta – suavemente – em uma correia transportadora, que leva a fruta para um compartimento na parte inferior da plataforma. A plataforma carrega três (3) caixas e, assim que uma caixa estiver cheia de frutas, a plataforma a coloca suavemente no chão na parte de trás da plataforma e pega uma nova caixa vazia.
Uma vez colhidos os frutos nas árvores de ambos os lados da Plataforma, a Plataforma move-se – automática e autonomamente – para a próxima secção de árvores, e inicia, novamente, o procedimento acima descrito – até atingir o fim da fila e é então virada para a fila seguinte para continuar a colheita (Figura 4) .

Especificações do trabalho da FFRobotics
O rendimento final do FFRobot Harvester é de 9.000 frutas por hora (por exemplo, cerca de 1,4-1,5 toneladas métricas de maçãs por hora) – o que é cerca de 10 vezes mais do que a produção média de um colhedor humano habilidoso. O FFRobot Harvester pode trabalhar 20 horas por dia (funciona também à noite com iluminação artificial montada na plataforma), produzindo assim cerca de 30 toneladas de frutas colhidas por dia.
O FFRobot Harvester normalmente alcança cerca de 90% dos frutos de uma determinada árvore em um pomar configurado com parede de frutificação, com uma porcentagem bastante baixa (5%) de danos aos frutos.
Durante o processo de colheita, o FFRobot coletará dados e os armazenará para referência futura do produtor: Número total de frutas, bem como frutas colhidas por árvore, fileira, dunam/acre e pomar, e estrutura da árvore. Esses dados podem ser usados para orientar futuras melhorias no gerenciamento do pomar para fornecer frutas de melhor qualidade e melhorias de sustentabilidade.


